

이물질 삼켰을 때 부작용 없이 꺼내는 ‘기관지 내시경로봇’ 기술 개발
뉴스1
입력 2024-05-02 18:43 수정 2024-05-02 18:44
기사공유 |
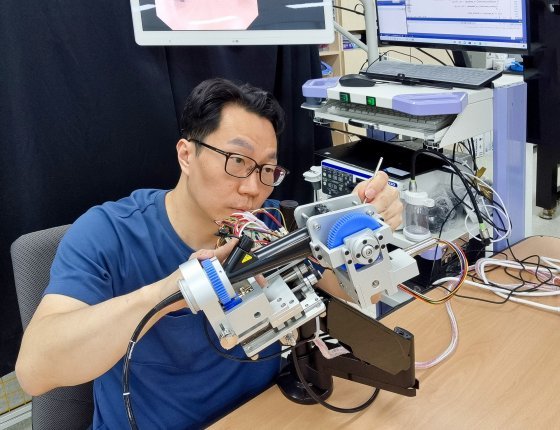 한국기계연구원 의료로봇연구실 김기영 책임연구원이 기관지 내시경 로봇시스템을 점검하고 있다.(기계연 제공)/뉴스1
한국기계연구원 의료로봇연구실 김기영 책임연구원이 기관지 내시경 로봇시스템을 점검하고 있다.(기계연 제공)/뉴스1국내 연구진이 이물질 삼켰을 때 부작용 없이 바로 꺼내는 기관지 내시경 로봇 기술을 개발했다.
한국기계연구원(KIMM) 의료로봇연구실 김기영 책임연구원과 충남대병원 이비인후과 장재원 교수 공동연구팀은 얇고 유연한 연성 기관지 내시경에 카메라 방향을 조절할 수 있는 로봇 기술을 결합한 기관지 내시경 로봇 시스템을 개발했다고 2일 밝혔다.
이 로봇은 미니 돼지를 이용한 임상실험에서 기관지 내에 삽입된 이물질 제거에 성공했다.
이 시스템은 기관지 내시경 카메라를 내시경 로봇과 결합해 의료진이 직접 위치를 조정할 수 있도록 다관절 거치대에 고정하는 방식이다.
또 내시경 겸자 그리퍼에 굴곡이 가능한 관절을 부착하고, 관절의 방향을 조정할 수 있는 와이어를 설치했다. 이를 통해 그리퍼의 방향과 각도를 조절해 원하는 위치에 이물질을 쉽게 제거할 수 있다.
연구팀은 의료진의 안구 움직임을 추적할 수 있는 안구 위치 추적 기술과 의료진이 직접 발로 조작할 수 있는 풋페달 장치 기술도 통합했다. 이 기술로 내시경 카메라가 굴곡과 직진, 회전을 통해 이물질이 위치한 방향으로 도달할 수 있으며, 의료진 스스로 조작할 수 있어 투입 인력을 최소화할 수 있다.
기존 기관지 내시경 겸자 기구는 굴곡이 가능한 관절이 없어 상하좌우로 방향 조절이 불가능, 이물질 제거에 한계가 있었다.
김기영 책임연구원은 “기존의 로봇 기술을 내시경 겸자 기구에 적용해 부작용을 줄이는 등 수술적 치료의 한계를 극복할 수 있게 됐다”며 “앞으로 이물질 제거 수술뿐만 아니라 일반 외래에도 적용할 수 있는 더 작은 크기의 내시경 겸자 개발을 추진할 것”이라고 말했다.
장재원 교수는 “이번 임상 시험을 통해 기계연이 개발한 로봇 시스템이 기존 수술 방법보다 부작용이 적고 이물질 제거 시 더 효과적 임을 검증했다”며 “향후 상기도 수술에도 적용할 수 있는 시스템을 개발할 것”이라고 밝혔다.
이번 연구는 범부처전주기의료기기연구개발사업단의 ‘상기도 내시경 수술을 위한 신개념 메디봇 핵심 기술 개발’ 과제의 지원을 받아 수행됐다.
(대전=뉴스1)





비즈N 탑기사







![마곡 ‘반값아파트’ 토지임차료는 월 82만 원[부동산 빨간펜]](https://dimg.donga.com/a/102/54/90/1/wps/ECONOMY/FEED/BIZN_REALESTATE/124969726.2.thumb.jpg "마곡 ‘반값아파트’ 토지임차료는 월 82만 원[부동산 빨간펜]")




 ‘배 속 43㎏ 똥’…3개월 화장실 못 간 남성의 충격적인 상태
‘배 속 43㎏ 똥’…3개월 화장실 못 간 남성의 충격적인 상태 ‘여친살해 의대생’ 포함 ‘디지털교도소’ 재등장…방심위, 접속차단 가닥
‘여친살해 의대생’ 포함 ‘디지털교도소’ 재등장…방심위, 접속차단 가닥 “알바라도 할까요?” 의정갈등 불똥 신규 간호사들, 채용연기에 한숨
“알바라도 할까요?” 의정갈등 불똥 신규 간호사들, 채용연기에 한숨 하룻밤에 1억3700만원…비욘세 묵은 럭셔리 호텔 보니
하룻밤에 1억3700만원…비욘세 묵은 럭셔리 호텔 보니 최강희, 피자집 알바생 됐다…오토바이 타고 배달까지
최강희, 피자집 알바생 됐다…오토바이 타고 배달까지- 마포대교 난간에 매달린 10대 구하려다 함께 빠진 경찰관 무사히 구조
- ‘투머치 토커’의 모자…민희진 폭주에 박찬호 소환 왜
- 백일 아기 비행기 좌석 테이블에 재워…“꿀팁” vs “위험”
- 최저임금 2만원 넘자 나타난 현상…‘원격 알바’ 등장
- “배우자에게 돈 보냈어요” 중고거래로 명품백 먹튀한 40대 벌금형




