

KAIST 참여 연구팀… 美 탐색로봇 대회 2위
윤신영 동아사이언스 기자
입력 2019-09-02 03:00 수정 2019-09-02 03:00
기사공유 |
지하 생존자 구출 등에 활용
 미국 방위고등연구계획국(DARPA)이 주최한 지하 공간 탐색 로봇 경연대회 1차 대회에서 한국 KAIST 연구팀이 참여한 국제연구팀이 2위를 차지했다.
미국 방위고등연구계획국(DARPA)이 주최한 지하 공간 탐색 로봇 경연대회 1차 대회에서 한국 KAIST 연구팀이 참여한 국제연구팀이 2위를 차지했다.
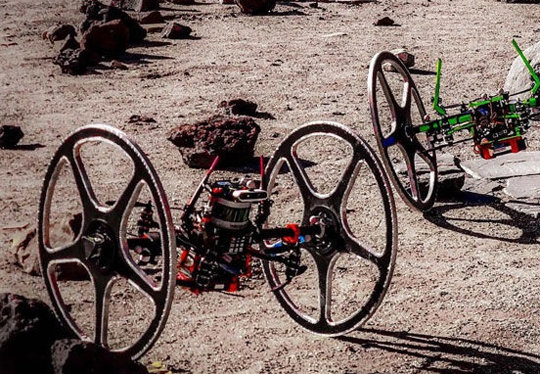
심현철 KAIST 전기 및 전자공학부 교수 팀과 미국항공우주국(NASA)의 제트추진연구소, 미 캘리포니아공대(칼텍), 매사추세츠공대(MIT)가 참여한 차세대 자율형 지하 공간 탐색 로봇 연구팀 ‘코스타(CoSTAR)’가 개발한 군집로봇(사진)이 8월 15∼22일 미국 피츠버그에서 개최된 ‘DARPA 지하 공간 탐색대회’에서 미국 카네기멜런대와 오리건주립대 연합팀 ‘익스플로러’에 이어 2위를 차지했다.
DARPA는 현재의 기술 수준을 뛰어넘는 복잡하고 어려운 기술을 빠르게 개발할 수 있도록 여러 단계로 구성된 복합적인 임무를 수행하는 경연 대회를 연다. 흔히 ‘DARPA 챌린지’라고 불린다. 한국에서는 2015년 오준호 KAIST 교수 팀이 개발한 ‘DRC-휴보’가 DARPA가 주최한 재난 대응 로봇 대회에서 우승을 차지하며 유명해졌다.
이번 대회는 지하 공간을 로봇을 이용해 빠른 시간 안에 탐색하는 기술을 겨룬다. 실제 로봇을 이용하는 분야와 컴퓨터 시뮬레이션을 이용하는 분야가 있다. 이번에는 실제 로봇을 작동시키는 분야로, 정해진 시간에 지하 공간의 지도를 정확히 만들고 숨겨둔 물체를 발굴하는 능력을 겨룬다. 8개국에서 11개 팀이 참여했으며 3년에 걸쳐 실력을 다툰다.
이번 참가팀들에는 인공 지하 공간인 광산 터널 두 곳을 각각 1시간 내에 탐색하는 임무가 주어졌다. 터널에는 각각 20개씩 물체가 숨겨져 있는데, 로봇으로 이 물체의 위치를 5m 이내의 오차로 찾으면 점수를 얻는다.
DARPA에 따르면 이번 대회에는 20대의 무인기와 64개의 로봇, 1대의 비행선이 참여했다. 코스타 팀은 무게 1kg 이하의 소형 군집로봇들로 어둠 속에서 카메라와 라이다(LIDAR·레이저 레이더)를 이용해 지하 공간 지도를 만들고, 통신이 자주 끊기는 깊은 지하 공간에서도 통신을 안정적으로 수행하는 지연허용망(DTN)을 이용해 임무를 수행했다. 총 40개의 숨겨진 물체 가운데 11개를 찾아, 25개를 찾은 익스플로러의 뒤를 이었다.
윤신영 동아사이언스 기자 ashilla@donga.com
심현철 KAIST 전기 및 전자공학부 교수 팀과 미국항공우주국(NASA)의 제트추진연구소, 미 캘리포니아공대(칼텍), 매사추세츠공대(MIT)가 참여한 차세대 자율형 지하 공간 탐색 로봇 연구팀 ‘코스타(CoSTAR)’가 개발한 군집로봇(사진)이 8월 15∼22일 미국 피츠버그에서 개최된 ‘DARPA 지하 공간 탐색대회’에서 미국 카네기멜런대와 오리건주립대 연합팀 ‘익스플로러’에 이어 2위를 차지했다.
DARPA는 현재의 기술 수준을 뛰어넘는 복잡하고 어려운 기술을 빠르게 개발할 수 있도록 여러 단계로 구성된 복합적인 임무를 수행하는 경연 대회를 연다. 흔히 ‘DARPA 챌린지’라고 불린다. 한국에서는 2015년 오준호 KAIST 교수 팀이 개발한 ‘DRC-휴보’가 DARPA가 주최한 재난 대응 로봇 대회에서 우승을 차지하며 유명해졌다.
이번 대회는 지하 공간을 로봇을 이용해 빠른 시간 안에 탐색하는 기술을 겨룬다. 실제 로봇을 이용하는 분야와 컴퓨터 시뮬레이션을 이용하는 분야가 있다. 이번에는 실제 로봇을 작동시키는 분야로, 정해진 시간에 지하 공간의 지도를 정확히 만들고 숨겨둔 물체를 발굴하는 능력을 겨룬다. 8개국에서 11개 팀이 참여했으며 3년에 걸쳐 실력을 다툰다.
이번 참가팀들에는 인공 지하 공간인 광산 터널 두 곳을 각각 1시간 내에 탐색하는 임무가 주어졌다. 터널에는 각각 20개씩 물체가 숨겨져 있는데, 로봇으로 이 물체의 위치를 5m 이내의 오차로 찾으면 점수를 얻는다.
DARPA에 따르면 이번 대회에는 20대의 무인기와 64개의 로봇, 1대의 비행선이 참여했다. 코스타 팀은 무게 1kg 이하의 소형 군집로봇들로 어둠 속에서 카메라와 라이다(LIDAR·레이저 레이더)를 이용해 지하 공간 지도를 만들고, 통신이 자주 끊기는 깊은 지하 공간에서도 통신을 안정적으로 수행하는 지연허용망(DTN)을 이용해 임무를 수행했다. 총 40개의 숨겨진 물체 가운데 11개를 찾아, 25개를 찾은 익스플로러의 뒤를 이었다.
윤신영 동아사이언스 기자 ashilla@donga.com





비즈N 탑기사

![[머니 컨설팅]사적연금 받을 때 세금 유불리 따져봐야](https://dimg.donga.com/a/102/54/90/1/wps/ECONOMY/FEED/BIZN/124603682.2.thumb.jpg "[머니 컨설팅]사적연금 받을 때 세금 유불리 따져봐야")










 백일 아기 비행기 좌석 테이블에 재워…“꿀팁” vs “위험”
백일 아기 비행기 좌석 테이블에 재워…“꿀팁” vs “위험” 최저임금 2만원 넘자 나타난 현상…‘원격 알바’ 등장
최저임금 2만원 넘자 나타난 현상…‘원격 알바’ 등장 “배우자에게 돈 보냈어요” 중고거래로 명품백 먹튀한 40대 벌금형
“배우자에게 돈 보냈어요” 중고거래로 명품백 먹튀한 40대 벌금형 이렇게 63억 건물주 됐나…김지원, 명품 아닌 ‘꾀죄죄한’ 에코백 들어
이렇게 63억 건물주 됐나…김지원, 명품 아닌 ‘꾀죄죄한’ 에코백 들어 상하이 100년간 3m 침식, 中도시 절반이 가라앉고 있다
상하이 100년간 3m 침식, 中도시 절반이 가라앉고 있다- 김지훈, 할리우드 진출한다…아마존 ‘버터플라이’ 주연 합류
- “도박자금 마련하려고”…시험장 화장실서 답안 건넨 전직 토익 강사
- 몸 속에 거즈 5개월 방치…괄약근 수술 의사 입건
- 일본 여행시 섭취 주의…이 제품 먹고 26명 입원
- “1인 안 받는 이유 있었네”…식탁 위 2만원 놓고 간 손님 ‘훈훈’
 포옹·악수·뽀뽀… ‘스킨십’, 육체적·정신적 고통 줄여주는 묘약
포옹·악수·뽀뽀… ‘스킨십’, 육체적·정신적 고통 줄여주는 묘약 흑석 아파트에 ‘서반포’ 붙인다고?…집값 프리미엄 꼼수 떠들썩
흑석 아파트에 ‘서반포’ 붙인다고?…집값 프리미엄 꼼수 떠들썩 신반포 22차 3.3㎡당 공사비 1300만원 확정…‘역대 최고가’
신반포 22차 3.3㎡당 공사비 1300만원 확정…‘역대 최고가’ “XAI, 인간의 노화 멈추는 법도 알려줄 것”
“XAI, 인간의 노화 멈추는 법도 알려줄 것” 밤에 잘 못 잔다면…이런 음식 끊어야
밤에 잘 못 잔다면…이런 음식 끊어야- 정부 ‘건설현장 불법행위’ 집중단속 실시…“일부 불법 여전”
- 편의점 택배비 인상…e커머스 ‘반품교환’ 택배비도 오른다
- 엄마 따라 밀레-보쉬 쓰던 伊서… 삼성, 가전 최고 브랜드로
- 최저임금 2만원 넘자 나타난 현상…‘원격 알바’ 등장
- 백일 아기 비행기 좌석 테이블에 재워…“꿀팁” vs “위험”