

켐에쎈, 충돌회피 알고리즘 적용한 드론 자율비행에 성공
박해식 동아닷컴 기자
입력 2019-10-15 14:56 수정 2019-10-15 15:00
기사공유 |
 충돌회피 알고리즘 적용한 드론의 자율비행. (켐에쎈 제공)
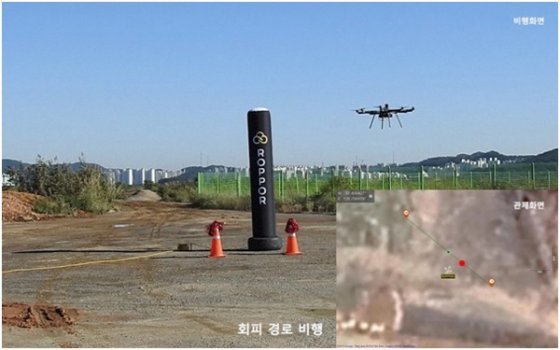
충돌회피 알고리즘 적용한 드론의 자율비행. (켐에쎈 제공)㈜켐에쎈(대표이사 박태윤)은 자체 개발한 ‘자율비행 충돌회피 알고리즘’을 자사의 LTE 기반 군집드론 플랫폼 ‘로퍼(ROPPOR)’에 적용해 회피비행에 성공했다고 15일 밝혔다.
켐에쎈에 따르면 ‘충돌회피 자율비행’은 크게 경로 비행→장애물 인식 및 회피 경로 재설정→회피 경로 비행→목적지 도착의 4단계를 거친다.
업체 측은 이번 실증 비행에 대해 기존의 장애물을 인식하고 멈추는 단계를 넘어서, 회피 경로를 스스로 재설정함으로써 비행체가 실질적인 ‘충돌회피 자율비행’을 수행하는 단계에까지 이르렀다는 데 그 의미가 있다고 강조했다.
켐에쎈 관계자는 “이번 ‘충돌회피 자율비행’의 성공이 최근 문제가 되고 있는 드론 충돌의 위험성을 줄이는 해결책이 될 수 있다”며, “당사의 LTE 기반 군집드론 플랫폼이 보다 안전하고 정밀한 원격 자율비행을 지원할 수 있다는 점을 입증 한 것”이라고 밝혔다.
이번 실증 비행은 산업통상자원부가 지원하는 ‘초경량 저가형 라이다(LiDAR) 센서 모듈 개발’의 일환으로 ㈜캠에쎈을 비롯하여, ㈜다인인더스, ㈜그린광학, 전자부품연구원과의 협업으로 이뤄졌다.
한편, 켐에쎈은 이번 실증 비행과 관련하여 '군집 비행을 위한 드론 비행 제어 장치', ' 비행경로 일괄 편집 및 시간 동기화를 통한 군집 드론의 자율 비행 방법', '라이다 기반 자율 충돌회피 기능을 포함하는 드론 및 그 제어 방법' 총 3건의 특허를 출원했다고 덧붙였다.
박해식 동아닷컴 기자 pistols@donga.com





비즈N 탑기사




![[머니 컨설팅]취득세 절감되는 소형 신축주택](https://dimg.donga.com/a/102/54/90/1/wps/ECONOMY/FEED/BIZN/124492099.2.thumb.jpg "[머니 컨설팅]취득세 절감되는 소형 신축주택")








 “도박자금 마련하려고”…시험장 화장실서 답안 건넨 전직 토익 강사
“도박자금 마련하려고”…시험장 화장실서 답안 건넨 전직 토익 강사 몸 속에 거즈 5개월 방치…괄약근 수술 의사 입건
몸 속에 거즈 5개월 방치…괄약근 수술 의사 입건 일본 여행시 섭취 주의…이 제품 먹고 26명 입원
일본 여행시 섭취 주의…이 제품 먹고 26명 입원 “1인 안 받는 이유 있었네”…식탁 위 2만원 놓고 간 손님 ‘훈훈’
“1인 안 받는 이유 있었네”…식탁 위 2만원 놓고 간 손님 ‘훈훈’ 10만원짜리 사탕?…쓰레기통까지 뒤져 찾아간 커플
10만원짜리 사탕?…쓰레기통까지 뒤져 찾아간 커플- 꿀로 위장한 고농축 대마 오일…밀수범 2명 구속 송치
- 송지아·윤후, 머리 맞대고 다정 셀카…‘아빠! 어디가?’ 꼬마들 맞아? 폭풍 성장
- 한소희 올린 ‘칼 든 강아지’ 개 주인 등판…“유기견이 슈퍼스타 됐다” 자랑
- 딱 한 장만 산 복권이 1등 당첨…20년간 월 700만원
- 기존 크림빵보다 6.6배 큰 ‘크림대빵’ 인기
- 햄 ‘빼는 값’ 2000원 더 받는 김밥집…손님 사진 SNS 올리고 조롱까지
 ‘카드부터 신분증까지’ 갤럭시 스마트폰 쓴다면 지갑 말고 이렇게![이럴땐 이렇게!]
‘카드부터 신분증까지’ 갤럭시 스마트폰 쓴다면 지갑 말고 이렇게![이럴땐 이렇게!] 나무통 가득 24년산 ‘일품진로’ 향기
나무통 가득 24년산 ‘일품진로’ 향기 부동산 PF, ‘뉴머니’ 대신 4단계로 옥석 가린다
부동산 PF, ‘뉴머니’ 대신 4단계로 옥석 가린다 시니어주택 수요 못따라가… “수도권 규제 완화를”
시니어주택 수요 못따라가… “수도권 규제 완화를”- ‘통합 이마트’ 출범한다… 이마트, 이마트에브리데이 흡수 합병
- “연금 높여 노후보장” “소진땐 소득의 35% 내야” …시민대표단 500명의 선택은?
- 인간 수준의 사고능력 가진 AI 나오나… 초고성능 칩렛 개발
- [DBR]창업 성공에서 행운이 차지하는 비중은?
- [DBR]가업, 승계만이 정답일까… 사업 영속성 고민해야